ساخت ربات چنگک شکل برای کار با اشیا باریک و نازک توسط محققان دانشگاه MIT
رسانه کلیک - محققان علوم کامپیوتر و هوش مصنوعی دانشگاه MIT ربات چنگک شکل را طراحی کردهاند که قابلیت نگه داشتن و کار کردن با اشیا نازک و باریک مثل طناب و سیم را دارد.


رباتهایی که قابلیت نگه داشتن و کار با اجسام نازک و باریک را دارند میتوانند در آینده برای انجام کارهای تعمیرات خانه و یا کارهای خانگی مثل تاکردن لباسها، یا شکل دادن به سیمهای نازک مورد استفاده قرار گیرند. به گفته سخنگوی دانشگاه MIT راشل گردون، معمولاً کار کردن با اجسام باریک برای انسانها کمی مشکل و چالش برانگیز است و این کار تا پیش از این برای بسیاری از رباتها غیرممکن بوده است. علاوه بر این رباتهای ساخته شده تاکنون قادر به ایجاد یکسری تغییر شکلهای روتین و ساده بر روی اشیا بودهاند و باید از ابزارهای مکانیکی نیز برای انجام ایجاد این تغییر شکلها استفاده میکردند.
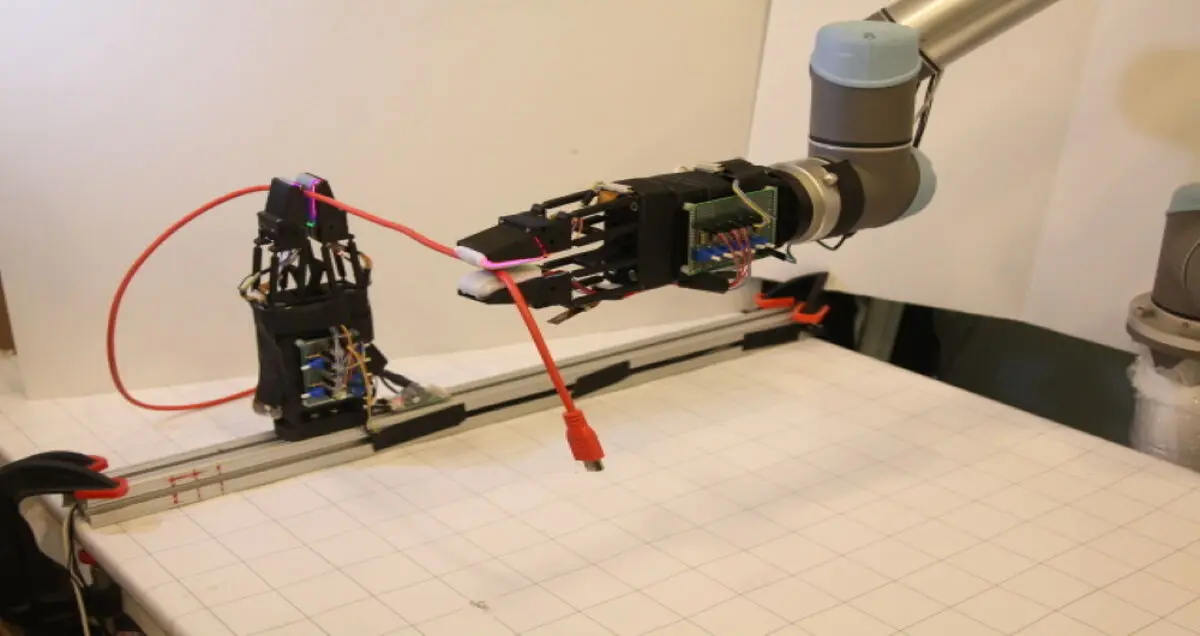
محققان دانشگاه MIT به منظور رفع این مشکلات و چالشها در این ربات چنگک شکل از دو چنگک در کنار هم استفاده کردهاند تا به نوعی بیشترین شباهت را با انگشتان انسان داشته باشد. انگشتان این ربات چنگک شکل مجهز به حسگرهای لمسی با دقت بسیار بالا هستند که به حسگرهای Gelsight معروفاند. علاوه بر این جنس انگشتان از لاستیک نرم است و روی بازوهای ربات دوربینهایی تعبیه شده است. این ربات دارای دو کنترل کننده است. یکی قدرت در دست گرفتن شی را تعدیل میکند و دیگری تنظیم کننده گیره چنگک برای نگه داشتن اشیا و اجسام باریک و نازک است.
گردون در صحبتهای خود به این نکته اشاره کرده است که از آنجایی که کار کردن با کابلهای باریک نیازمند حرکتهای ریز و دقیق توسط ربات و همچنین قدرت نگه داشتن اجسام باریک توسط آن است، کار کردن با کابلها به خصوص آن دسته از کابلهای نازک و باریک برای رباتها کاری سخت و دشوار است. نکته جالب در خصوص ربات ساخته شده توسط دانشگاه MIT این است که این ربات قادر است کارهایی را انجام دهد که پیش از این رباتها قادر به انجام آن نبودهاند؛ مثل پیدا کردن سر و ته سیمهای نازک و یا وصل کردن آنها به یکدیگر.
هرچند هنوز مراحلی از ساخت ربات برای تواناتر کردن آن در انجام کارهای ظریفتر مثل کار با کابلهای USB وجود دارد. یکی از کارهایی که این ربات هنوز قادر به انجام دادن آن نیست این است که وقتی به انتهای کابل رسید نمیتواند حرکت کابل را در دست خود برعکس کند و به احتمال زیاد کابل از چنگکهای ربات خارج میشود. برای انجام چنین کاری باید عملکرد حسگرهای ربات ارتقا داده شود.